
24 Indicador de carretera para TPBot con lente Inteligencia Artificial, Jándalo Robótix
Propósito
- Guíe el TPBot a través de la lente AI para conducir por los indicadores de la carretera. con Inteligencia Artificial
Material
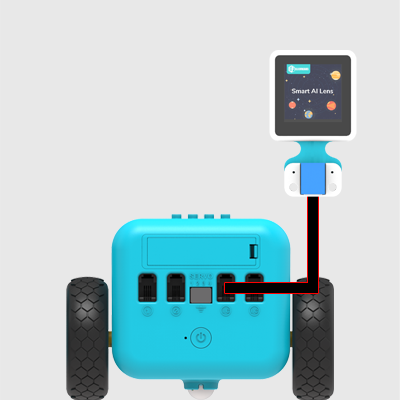
1 x TPBot
Conecte la lente AI al puerto IIC en TPBot.

Software :
MicroSoftmakecode
Programación:
Haga clic en “Avanzado” para ver más opciones en el cajón MakeCode.
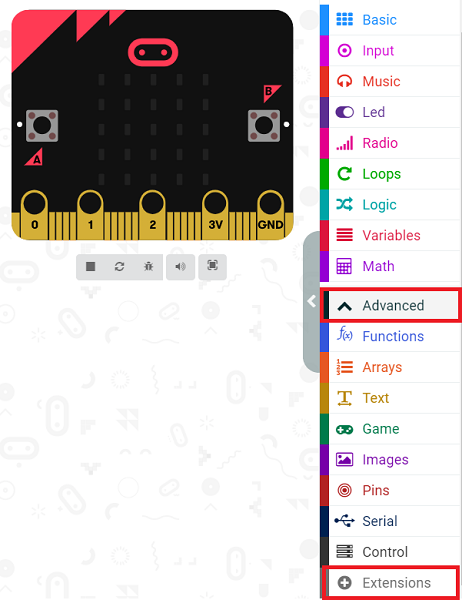
Necesitamos agregar un paquete para la programación. Haga clic en “Extensiones” en la parte inferior del cajón y busque “tpbot” en el cuadro de diálogo para descargarlo.
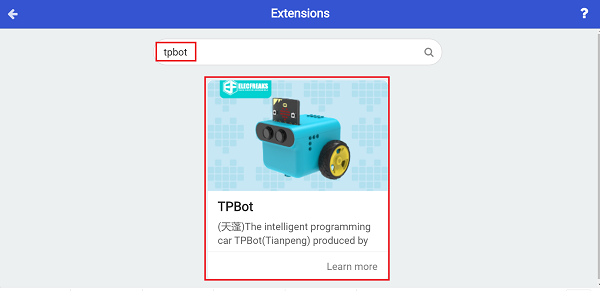
- Necesitamos agregar un paquete para programar el kit AI Lens. Haga clic en “Extensiones” en la parte inferior del cajón y busque
https://github.com/elecfreaks/pxt-PlanetX-AIen el cuadro de diálogo para descargarlo.
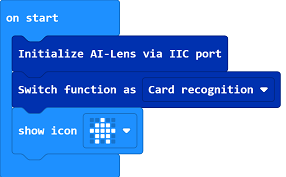
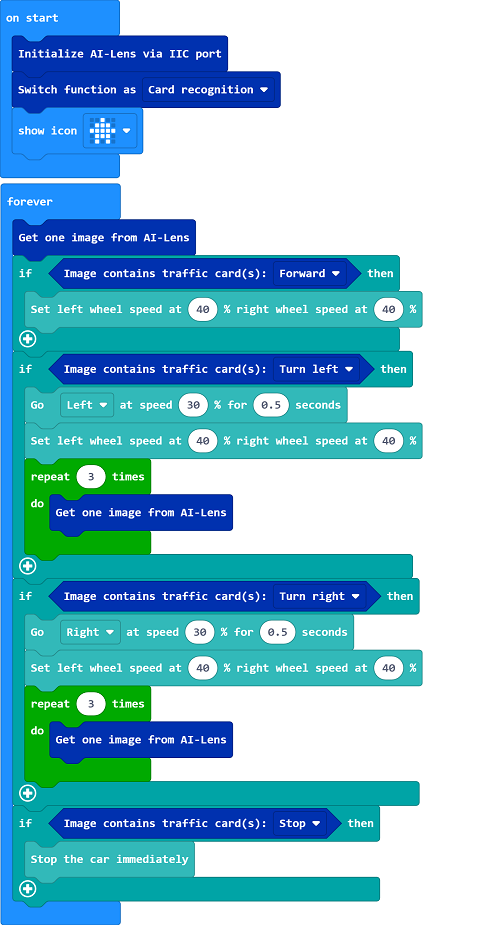
- Inicialice el kit de lentes AI en el bloque de inicio On y cambie su función al reconocimiento de tarjetas.
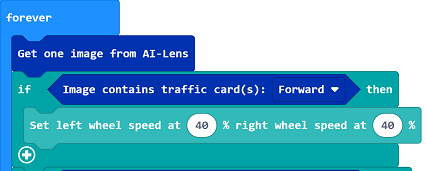
- En forever brick, obtenga una imagen de la lente AI, si la imagen contiene las señales de tráfico de conducir hacia adelante, configure el TPBot para que conduzca a la velocidad del 40%.
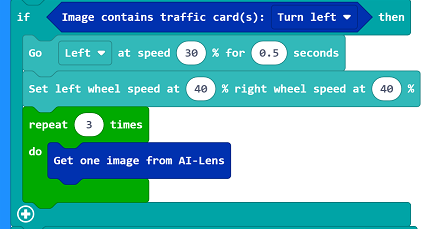
- Si la imagen dice girar a la izquierda, configure el TPBot para que gire a la izquierda a una velocidad del 30% durante 0,5 segundos y siga avanzando. Como el AI Lens tiene tres zonas de amortiguación, aquí necesitamos repetir la recopilación de imágenes tres veces y desecharlas para borrar el búfer.
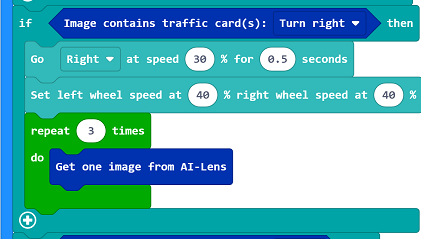
- Si la imagen dice girar a la derecha, configure el TPBot para que gire a la derecha a una velocidad del 30% durante 0,5 segundos y siga avanzando. Como el AI Lens tiene tres zonas de amortiguación, aquí necesitamos repetir la recopilación de imágenes tres veces y desecharlas para borrar el búfer.
- Si la tarjeta dice detener, detenga el TPBot inmediatamente.
Todo el Código Junto
Código: https://makecode.microbit.org/81425-39628-84001-59086
Conclusión
El TPBot actúa como indican las tarjetas, si la tarjeta contiene una señal de avance, avanza; si está girando a la izquierda, el TPBot gira a la izquierda y avanza; si está girando a la derecha, el TPBot gira a la derecha y avanza; si es una señal de parada, el TPBot deja de moverse.
Post a Comment
Lo siento, debes estar conectado para publicar un comentario.