

22 TPBot con control de color , Jándalo Robótix
Propósito
- El LED del arco iris cambia de acuerdo con el color de las tarjetas y ejecuta las funciones definidas en consecuencia (avanzar, cambiar el color de los faros al azar, evitar obstáculos, seguir la línea)
Material
1 x TPBot
Conecte el led arco iris al puerto 1 y el sensor de color al puerto IIC en TPBot.
Software :
MicroSoftmakecode
Programación:
Haga clic en “Avanzado” para ver más opciones en el cajón MakeCode.
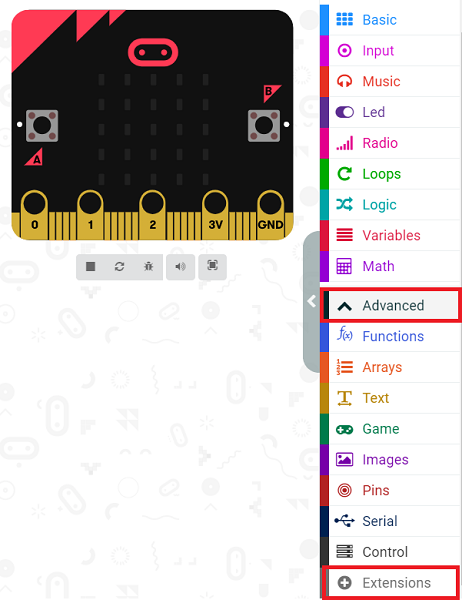
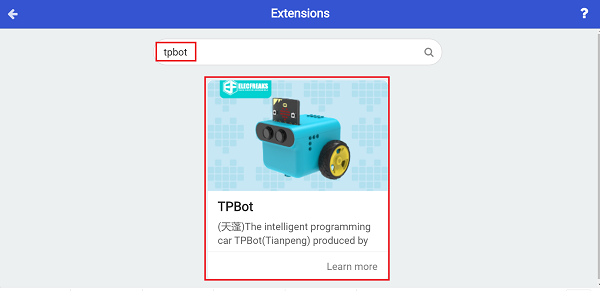
Necesitamos agregar un paquete para la programación. Haga clic en “Extensiones” en la parte inferior del cajón y busque “tpbot” en el cuadro de diálogo para descargarlo.
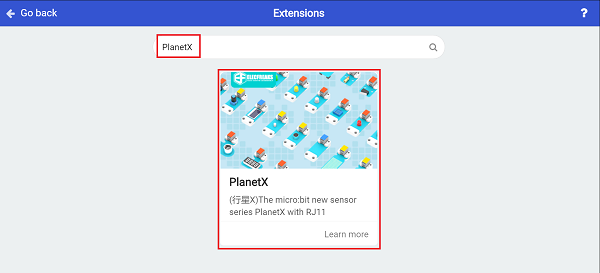
- Necesitamos agregar un paquete para la programación. Haga clic en “Extensiones” en la parte inferior del cajón y busque “PlanetX” en el cuadro de diálogo para descargarlo.
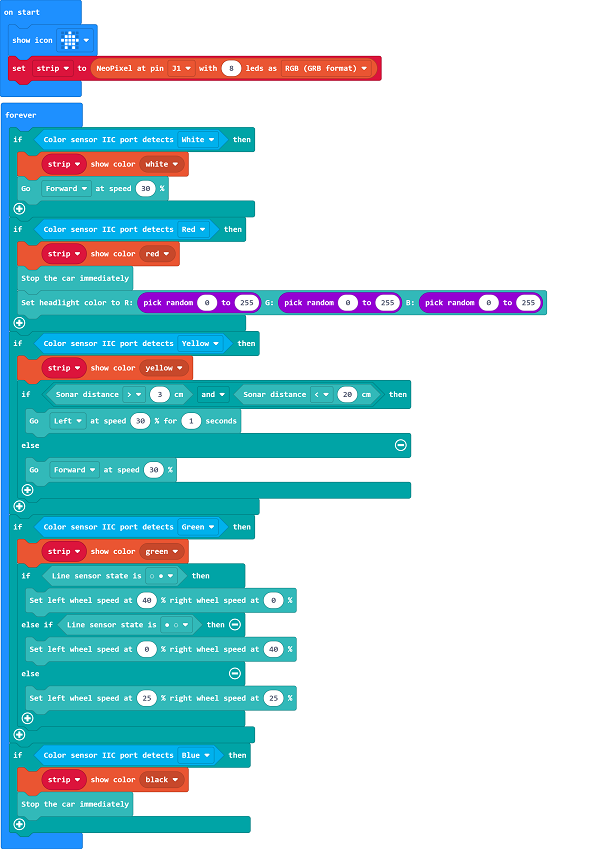
- En el bloque de inicio, arrastre el bloque del icono de mostrar hacia él e inicialice la tira de LED y la conecte al puerto J1.

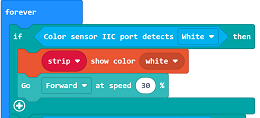
- En por siempre, configure el LED del arco iris en blanco si el sensor de color detecta el blanco, y configure TPBot para avanzar a la velocidad del 30%.
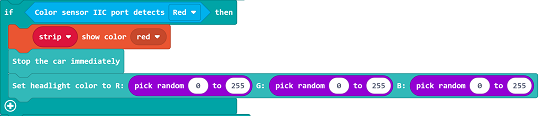
- Configure el LED del arco iris en rojo si el sensor de color detecta rojo, configure TPBot para que deje de moverse y el valor RGB del faro en un número aleatorio entre 0 ~ 225.
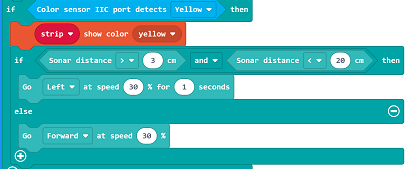
- Configure el LED del arco iris en amarillo si el sensor de color detecta amarillo, y juzgue si el valor devuelto por el sonar: bit está entre 3 ~ 20. En caso afirmativo, configure TPBot para girar a la izquierda durante 1 segundo a la velocidad del 30% o avanzar a la velocidad del 30%.
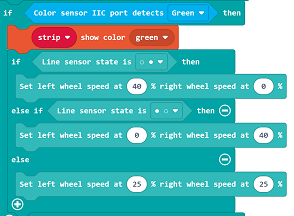
- Establezca el LED del arco iris en verde si el sensor de color detecta verde, y juzgue el estado del sensor de seguimiento de línea bidireccional. Si se detecta negro a la izquierda, establezca la velocidad de la rueda izquierda en 0 y la derecha en 40; si se detecta a la derecha, establezca la velocidad de la rueda izquierda en 40 y la derecha en 0; si se detecta en ambos lados, significa que el TPBot no se desvía de la línea negra y establece que se mueva hacia adelante a una velocidad del 25%.
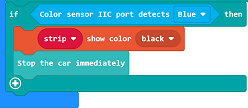
- Configure el LED del arco iris en azul si el sensor de color detecta azul, configure el TPBot para que deje de moverse.
Todo el Código Junto
Código: https://makecode.microbit.org/56274-55340-73407-33561
Conclusión
- Coloque las tarjetas de diferentes colores en la parte frontal del sensor de gestos para activar diferentes funciones:
- Tarjeta blanca: las luces LED del arco iris se encienden en blanco y TPBot avanza.
- Tarjeta roja: Las luces LED del arco iris se encienden en rojo y TPBot deja de moverse con los faros cambiando los colores al azar.
- Tarjeta amarilla: el LED del arco iris se enciende en amarillo y TPBot entra en el modo de evitación de obstáculos.
- Tarjeta verde: las luces LED del arco iris se encienden en verde y TPBot entra en el modo de seguimiento de línea.
- Tarjeta azul: el LED del arco iris se enciende en azul y TPBot deja de moverse.
Post a Comment
Lo siento, debes estar conectado para publicar un comentario.