

15 Seguir con distancias fijas
Propósito
- Programa para configurar el TPBot siguiendo a otro TPBot con una distancia fija.
Material
1 x TPBot

Software :
MicroSoftmakecode
Programación:
Haga clic en “Avanzado” para ver más opciones en el cajón MakeCode.
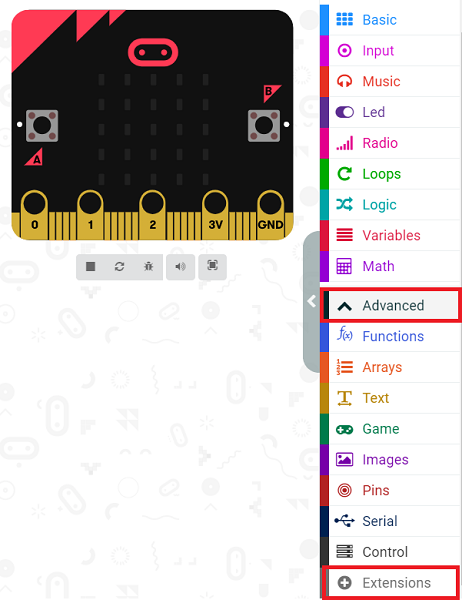
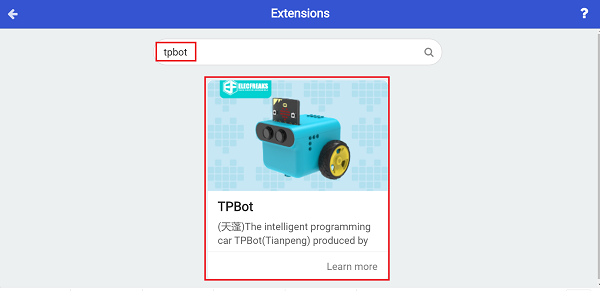
Necesitamos agregar un paquete para la programación. Haga clic en “Extensiones” en la parte inferior del cajón y busque “tpbot” en el cuadro de diálogo para descargarlo.
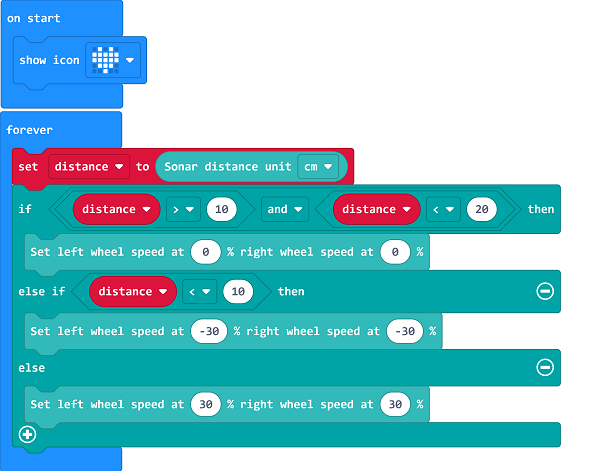
- Establecer un icono en la pantalla micro: bit.
- Guarde la variable como la distancia detectada desde el TPBot a su coche delantero en el bloque forever, juzgue si la distancia está entre 10 y 20 (exl. 10 y 20), en caso afirmativo, establezca la velocidad de ambas ruedas en 0; si la distancia es inferior a 10, ajuste la velocidad de ambas ruedas en -30%; o establezca la velocidad en ambos al 30%.
Código: https://makecode.microbit.org/26762-46061-67516-35587
Conclusión
Enciéndalo para mostrar un icono en la pantalla micro: bit y el TPBot se mantendrá a distancia de su vehículo delantero. Va más lento si la distancia detectada fue cercana o avanza si la distancia detectada fue lejana; y se detiene si la distancia detectada estaba entre el valor de intervalo establecido.
Post a Comment
Lo siento, debes estar conectado para publicar un comentario.